
取付部品 (片腕)
- サーボ1個
- サーボホーン 片羽と両羽を1個ずつ

- Arm_Shoulder (上)
- Joint_Servo_A(右上) (SG90またはMS18。脚部と共通部品)
- Joint_Servo_B(左上)(脚部と共通部品)
- Arm_Bracket(左右下) (SG90またはMS18)
- Hand(中央下)
※ プリンタ部品について、右腕と左腕で違いはありません。
サーボホーンとブラケットの準備
穴あけ処理
きれいに穴あけできた状態でプリントアウトできていれば、この工程は不要です。
以下の赤丸の穴が不完全な場合は、2mmのピンバイスできれいにしておきます。
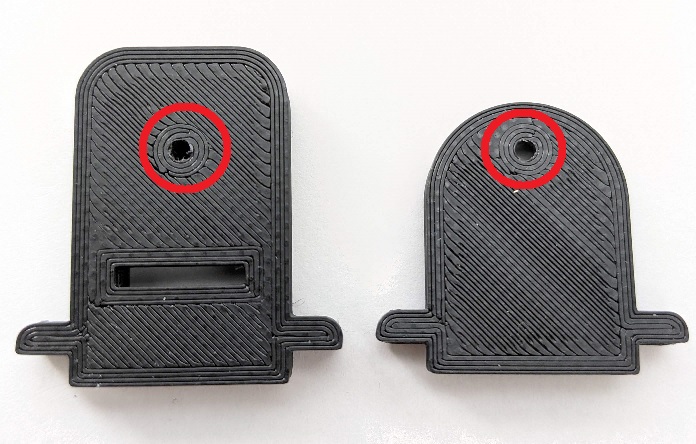
写真は脚部の部品です。腕部は少し長い部品になります。
サーボホーンの取り付け1

サーボに付属している両羽のホーンを利用します。(右)
穴を4つ残し、短くします。(左)
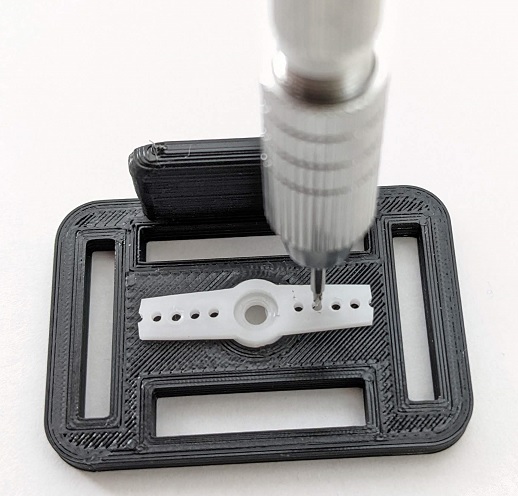
Arm_Shoulderに、上のホーンを取り付けします。M1.4のタッピングネジで固定しますが、1mmドリルで下穴を空けておくとネジが入りやすくなります。

2か所をM1.4のタッピングネジで固定します。
サーボホーンの取り付け2

サーボに付属している片羽のホーンをJoint_Servo_Aに取り付けます。
取り付け1と同様に、先に1mmドリルで下穴を空けておくとネジが入りやすくなります。
M1.4のタッピングネジで止めます。
サーボブラケット
※ 一部を除いて、脚部の写真を流用しています。腕部の部品は、少し長いです。

左の部品(Joint_Servo_B)には、M2ナットまたはM2ロックナットを入れます。
右の部品には、後ろからM2x8mmの皿ビスを通し、ワッシャーを被せます。(写真はMS18用)

2つの部品を合わせて、後ろから締めます。※部品の間には、ワッシャーが入っています。
一旦、しっかり締め付けて、2つの部品が動く程度に少し緩めます。
 写真はM2ロックナットの場合。
写真はM2ロックナットの場合。

ロックナットでない場合は、さらにM2ナットを被せ、ダブルナットにしてもよいです。外れにくくなります。
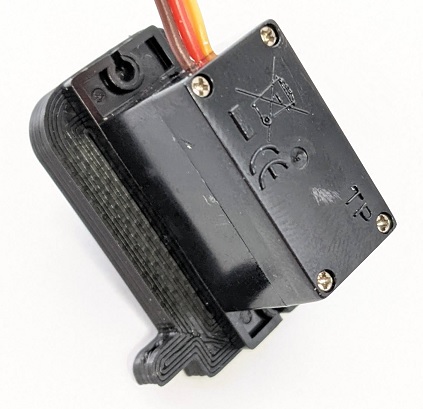
サーボにArm_Bracketを取り付けます。
不安定な場合は、サーボ付属のビスで固定します。
さらに、サーボに上で組み立てた部品を取り付けます。
サーボとサーボホーンの取り付け
セットアップ用コード

Micro:bitにセットアップ用コード「microbit-ForSetUp.hex」をインポートします。
脚部で利用したセットアップ用コード「microbit-ForSetUp.hex」をそのまま利用できます。
インポート方法は割愛します。
サーボとサーボホーン

サーボドライバボードに、腕サーボのコネクタを取り付けします。
右手の場合はSV8に、左手の場合はSV7に接続します。
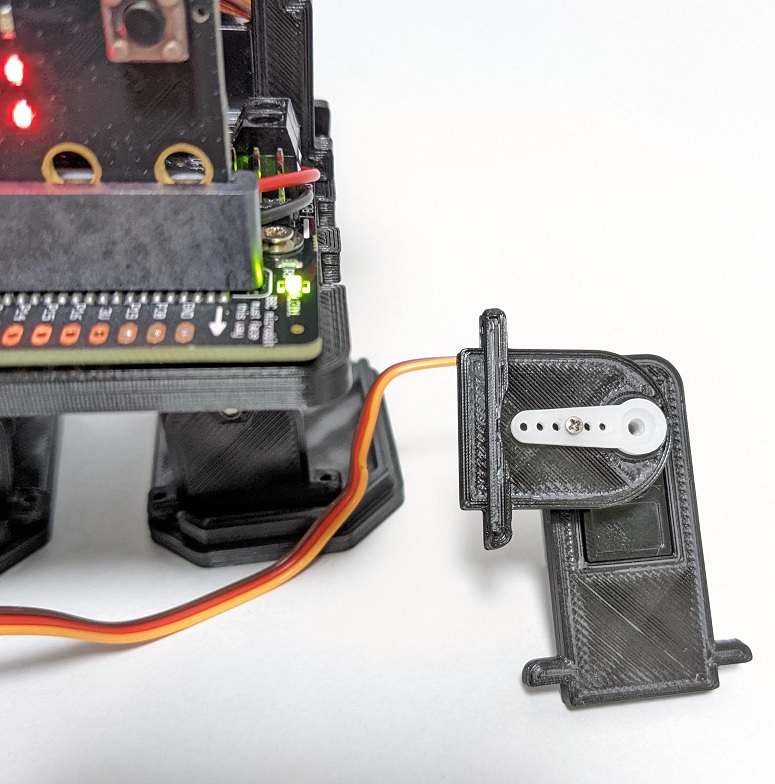
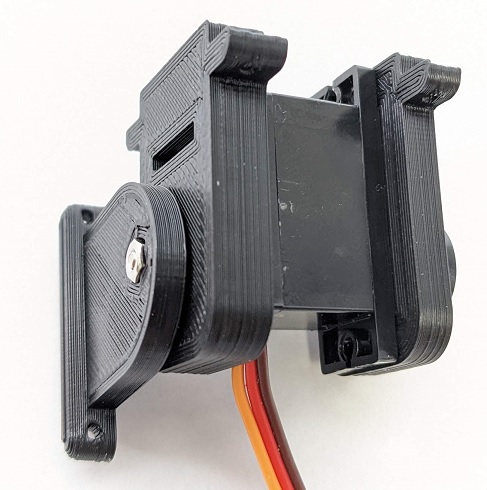
Micro:bitを取り付け、スイッチをいれたまま、サーボとサーボホーンの部品を合わせます。
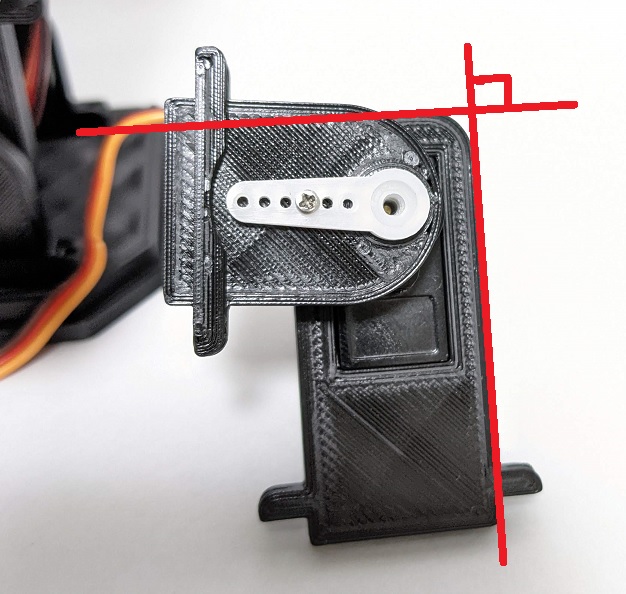
腕の場合はなるべく垂直、または、写真のように開くように取付します。
写真は右手用ですが、向きに注意してください。サーボホーンは背中側です。左手作成時は反対方向になります。
サーボの付属ネジで、サーボホーンをねじ止めします。
手
手の組み立て

4つの部品(指が3つ)を組み立てます。
小さな穴に3つの指が入ります。

サーボ部分と手を組み立てます。手には向きがあります。
不安定な場合は、4か所をM1.4のタッピングネジで止めます。
1mmのピンバイスで下穴を空けておくとネジが入りやすいです。
ボディに取り付ける
サーボとサーボドライバボードを一旦外します。
先に、コードをArm_Shoulderの穴に挿入しておきます。
再度、サーボとサーボドライバボードを接続します。
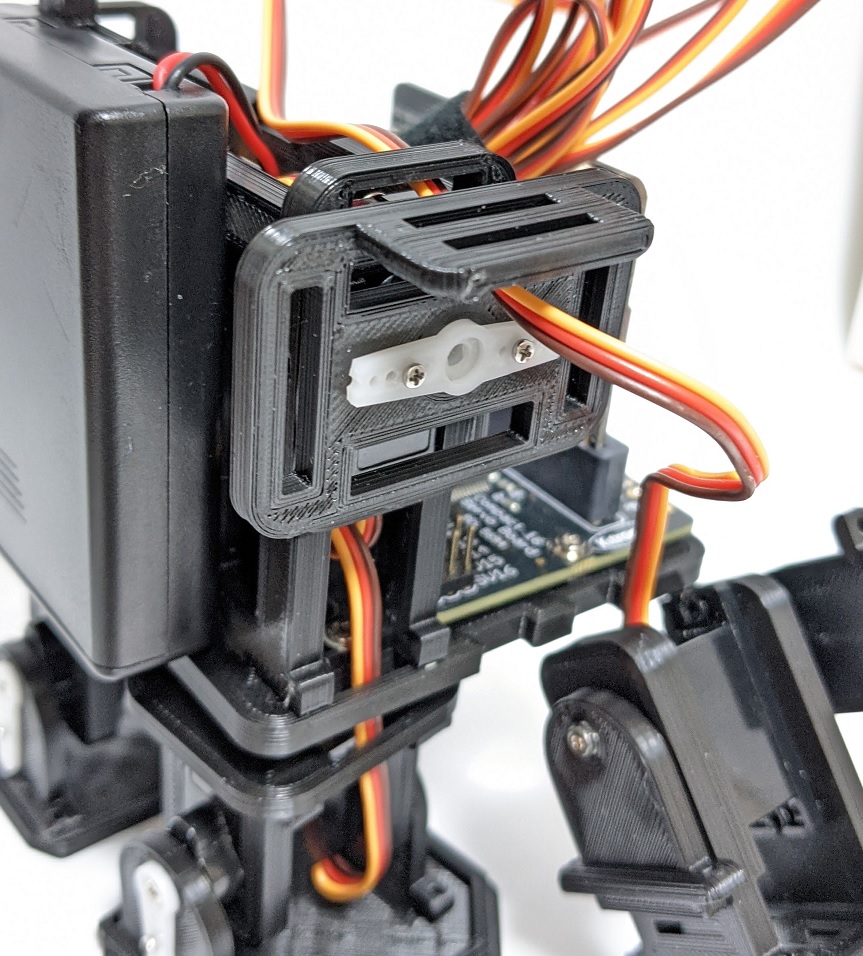
電源を入れ、ボディとArm_Shoulderを固定します。ボディとArm_Shoulderは、なるべく直線(垂直)になるようにします。
サーボ付属のネジで固定します。
ボディと腕を接続し、不安定な場合はM1.4のタッピングネジで固定します。
1mmドリルで下穴を空けておくとネジが入りやすいです。
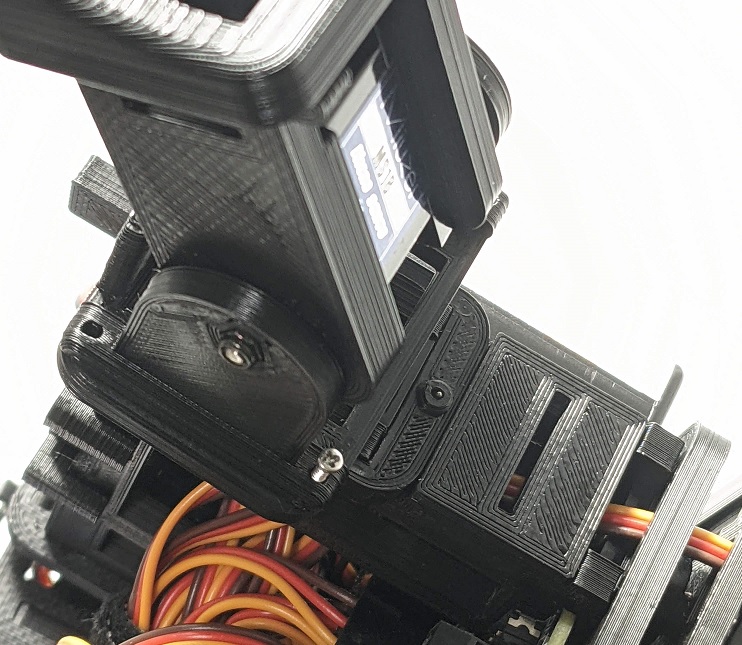
両腕の接続
 同様に組み立て、両腕を取り付けします。
同様に組み立て、両腕を取り付けします。
ボディの真ん中の穴からコネクタを出し、SV7とSV8に接続します。
これで腕の組み立てが完了です。