
サーボ4個、サーボドライバボード、電源を取り付けます。
取付部品
- サーボ 4つ(SG90 またはMS18)
- サーボドライバボード
- 電池ボックス
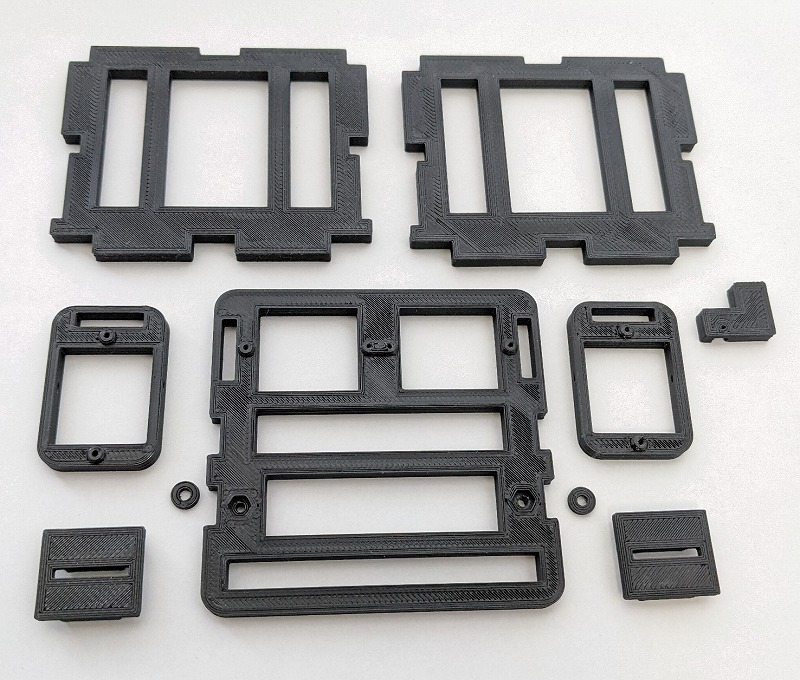
- Body_Base x1
- Body_Vertical x2
- Body_ETC x1
サーボの取り付け
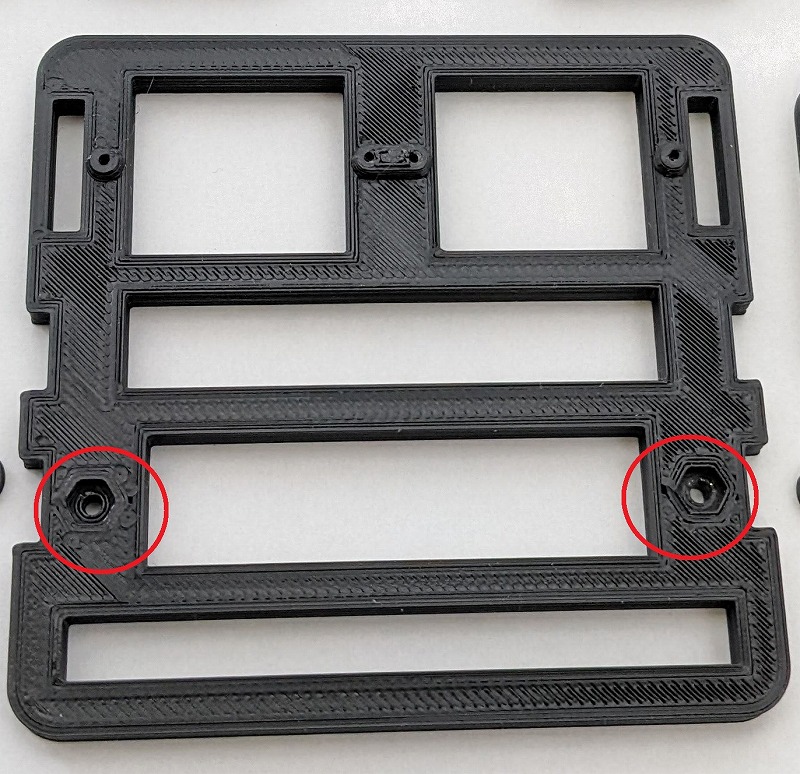
穴あけ処理
きれいに穴あけできた状態でプリントアウトできていれば、この工程は不要です。
以下の赤丸の穴が不完全な場合は、2mmのピンバイスできれいにしておきます。
サーボの取り付け1
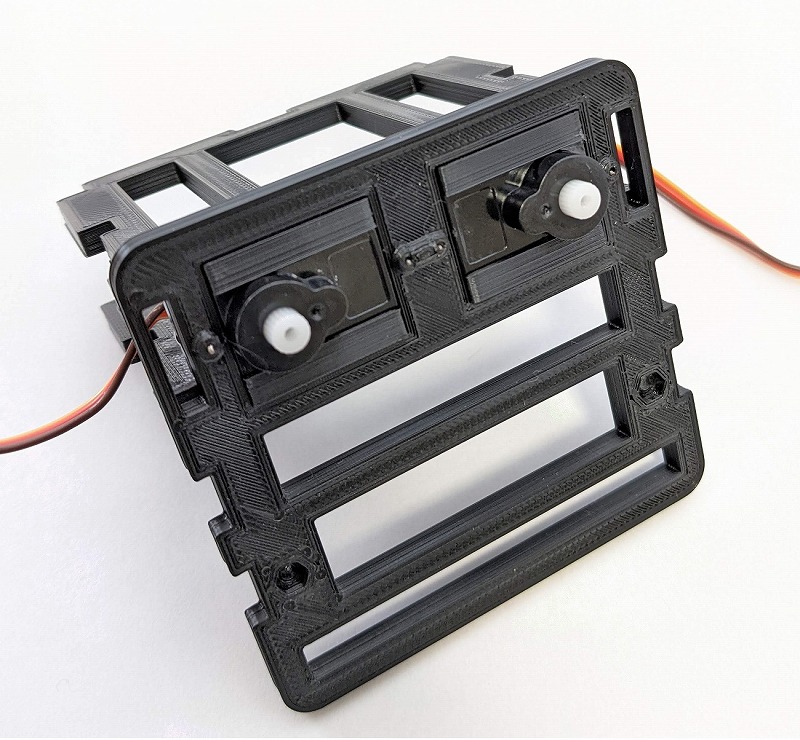
 BaseとVirticalを組み立てます。
BaseとVirticalを組み立てます。Baseは膨らみがある面を下にします。
Virticalは裏表ありません。
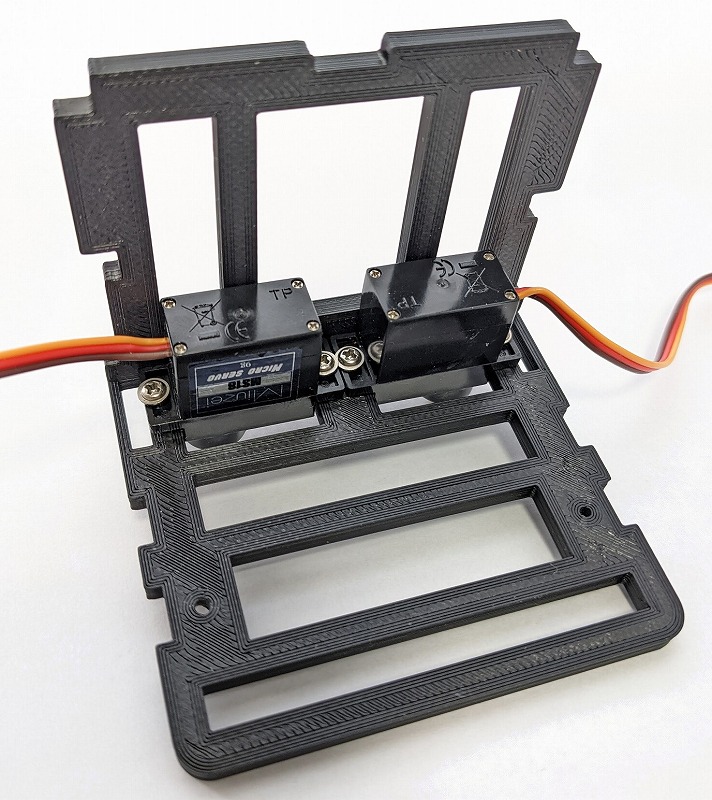
サーボ2つを、付属のネジで4か所を仮止めします。
写真はMS18の場合です。SG90も同様です。
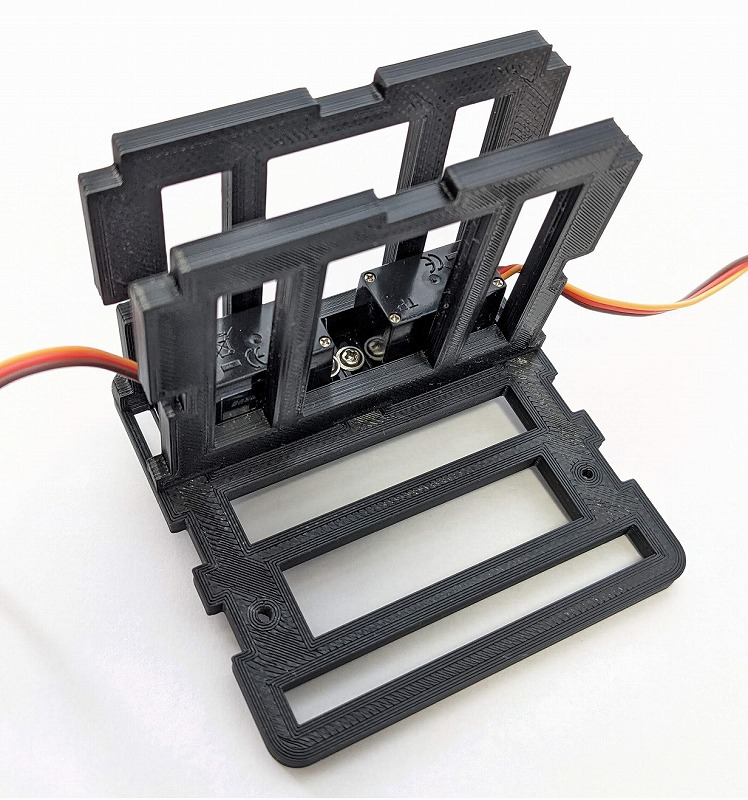
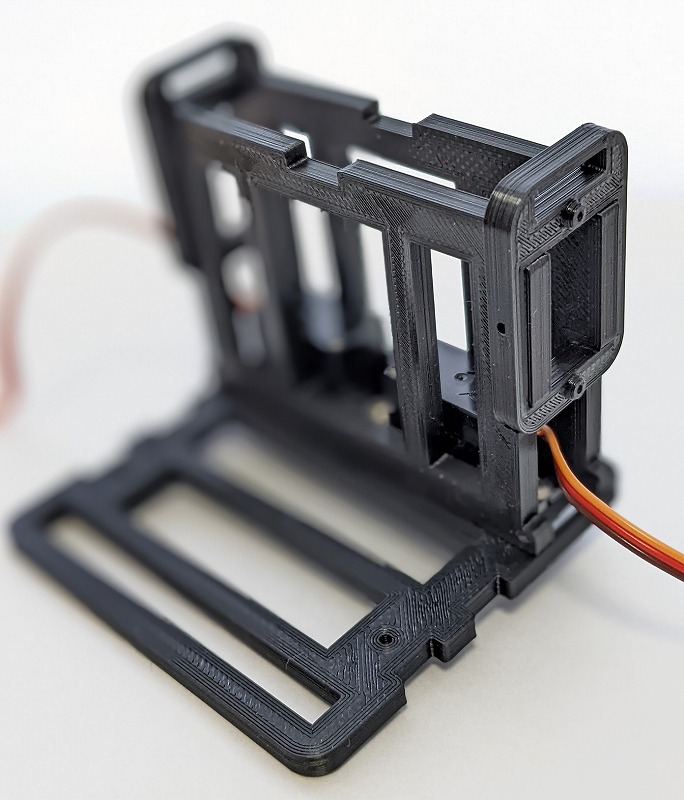
もう一枚を差し込み、ネジを本締めします。
下側。
サーボの取り付け2
一旦、肩の部品を仮で入れてみます。
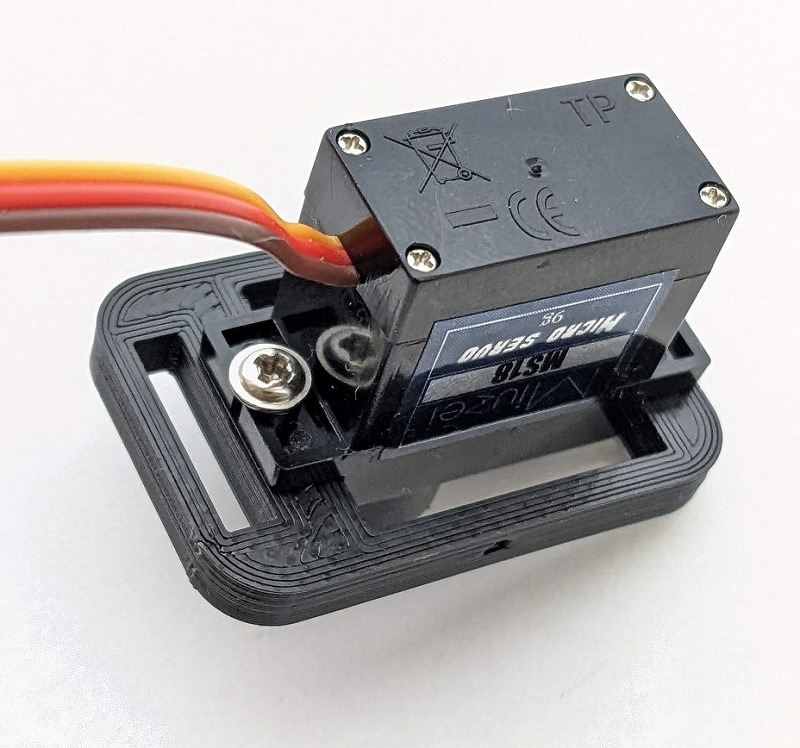
肩の部品を外し、サーボと仮止めします。
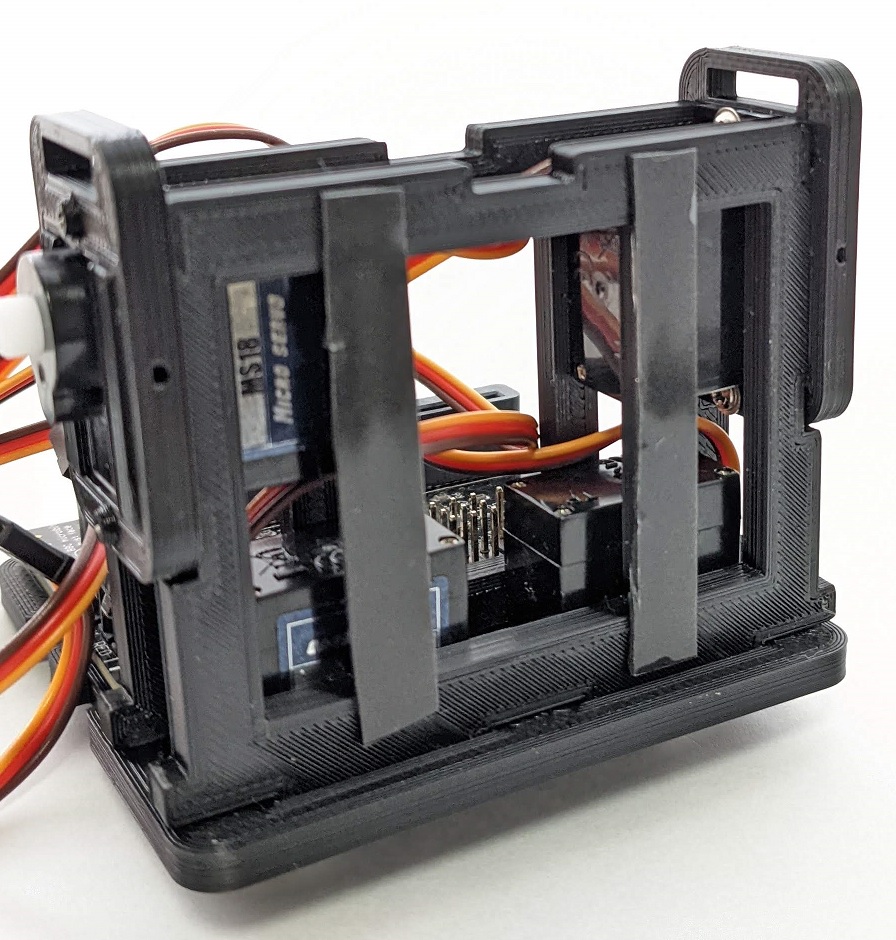
仮止めしたサーボとボディを組み立て、収まることを確認します。
再分解し、サーボのネジを本締めし、組み立てます。
サーボドライバボードの配置
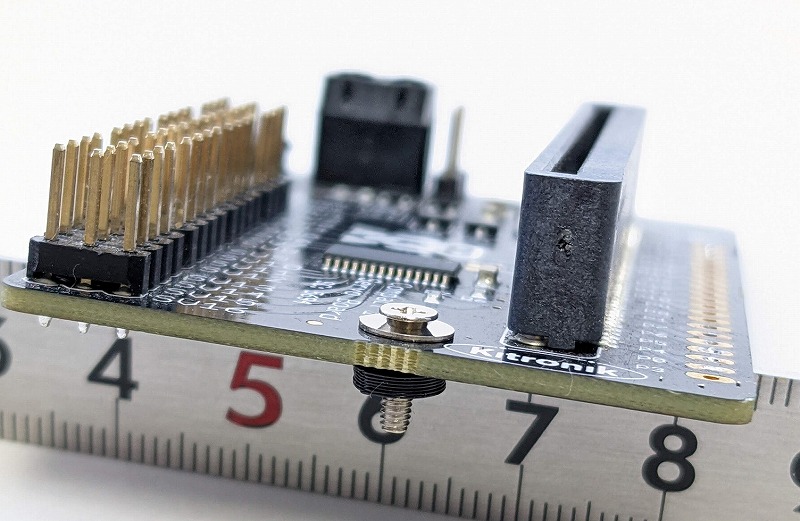
サーボドライバボードに、固定用ネジを通します。
皿ネジ M2x8mm、ワッシャー、ドライバボード、プリントアウトしたワッシャー、の順番です。

背面にナットを入れ、固定します。
電池ボックスの取り付け
スイッチ部品を固定する

1mmのピンバイスで、スイッチに穴を空けます。

仮で、1.4mmのタッピングネジを取付します。
固定できることを確認し、ネジを外します。

スイッチ部品を同じネジで固定します。
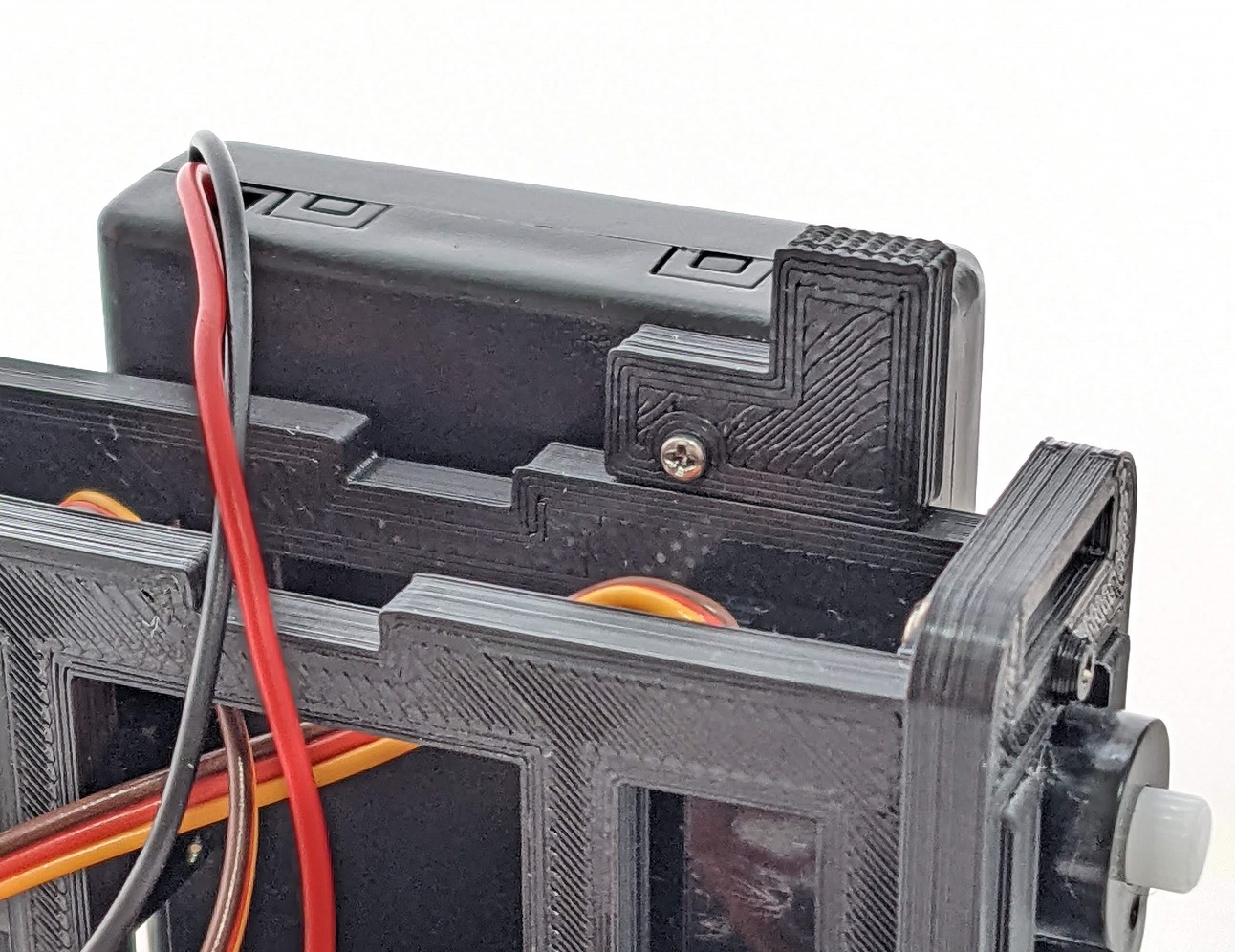
電池ボックスをボディに取り付ける
背面に両面テープを付けます。
ネジ等の固定でも問題ありません。

電池ボックスを貼り付けます。
前面。
電源コードを接続する
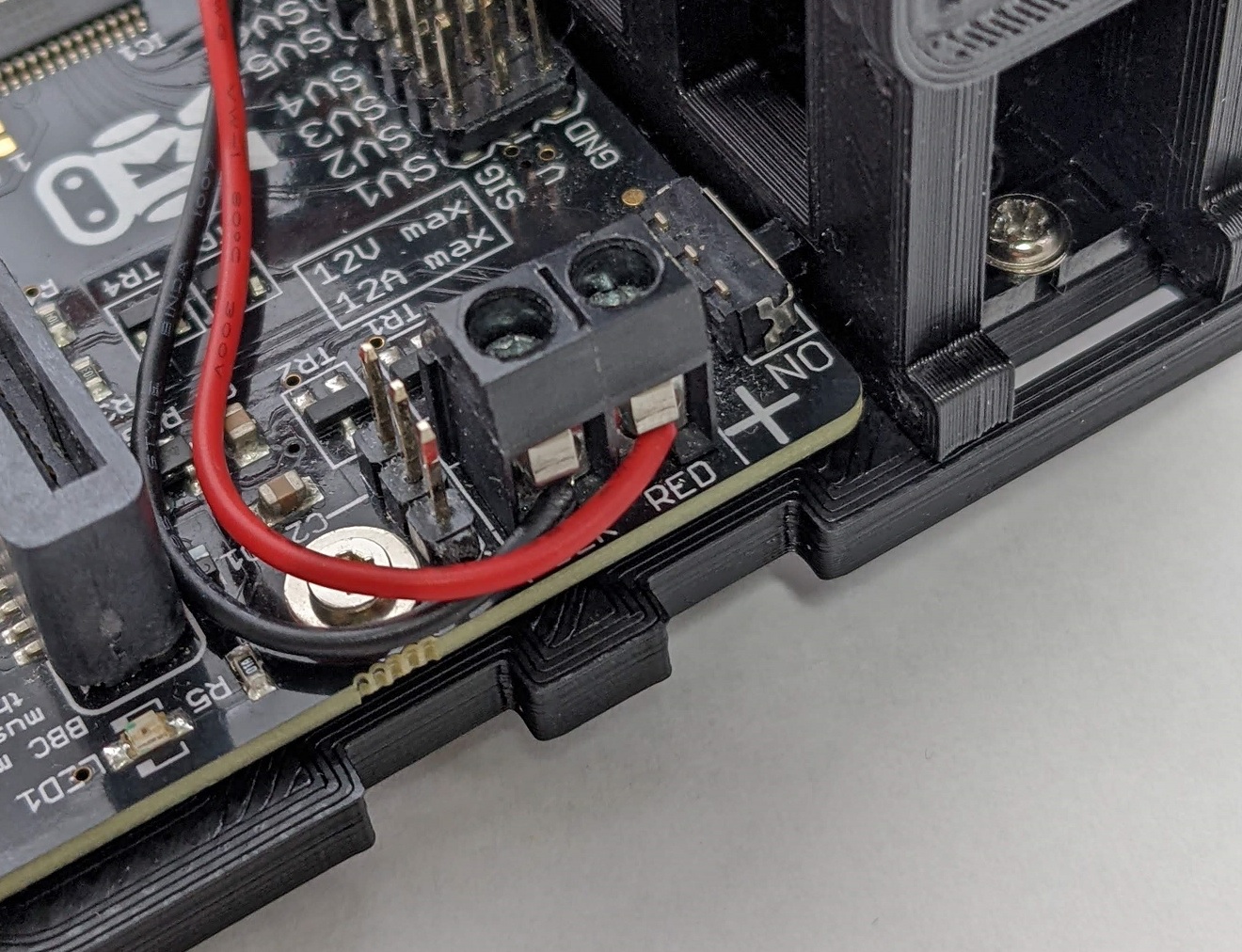
電池ボックスとドライバボードを接続します。
ドライバボードには、BLKとREDと記載されています。そのとおりに黒と赤のコードを接続し、ドライバーで締めます。
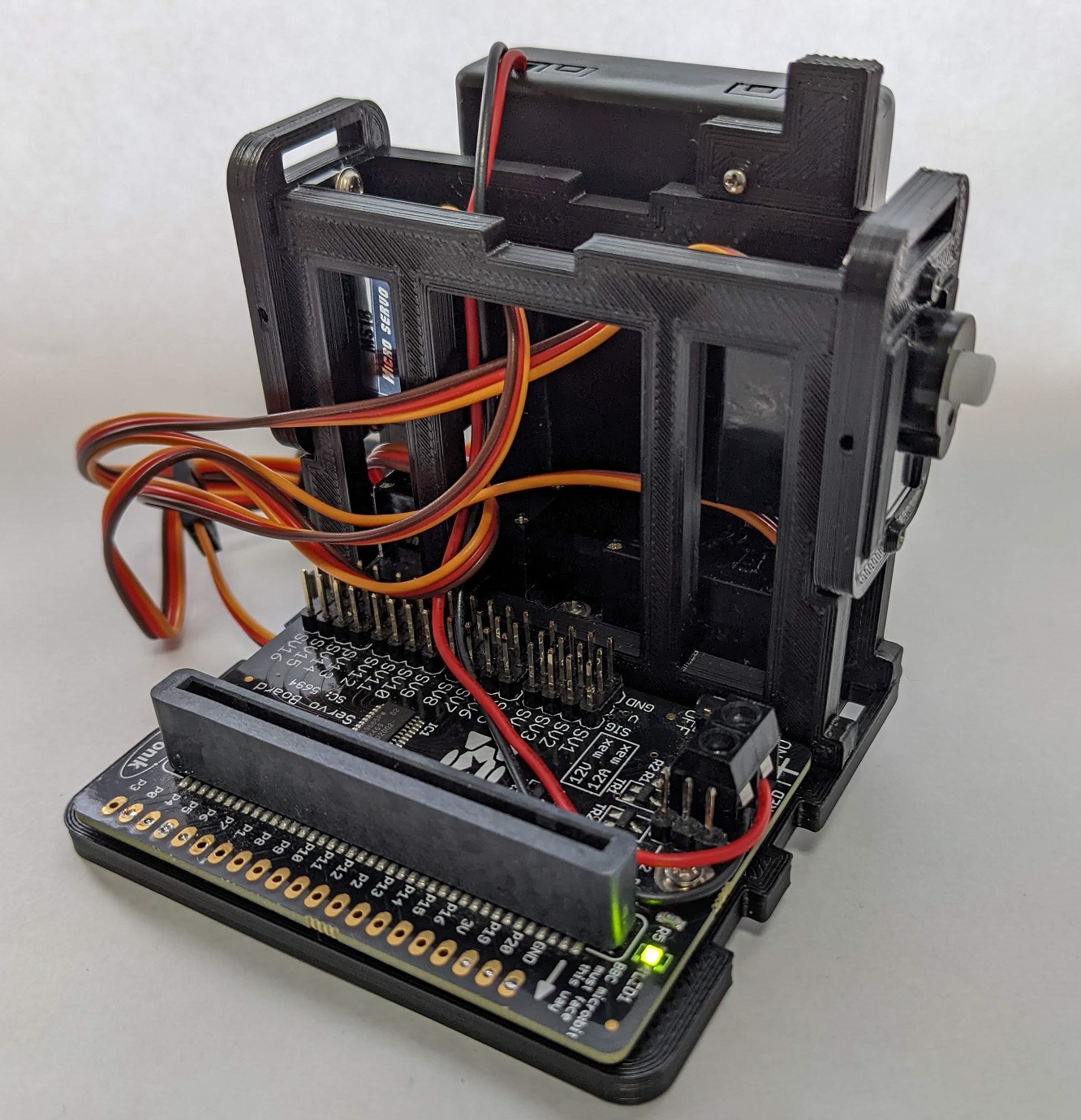
電池を入れて、スイッチを右にスライドすると、ボードのLEDが点灯することを確認します。
※ もし点灯せず、どこが問題か切り分けする場合は、都度電池を外しながら作業すると安全です。
乾電池でもショートすれば、発火します。
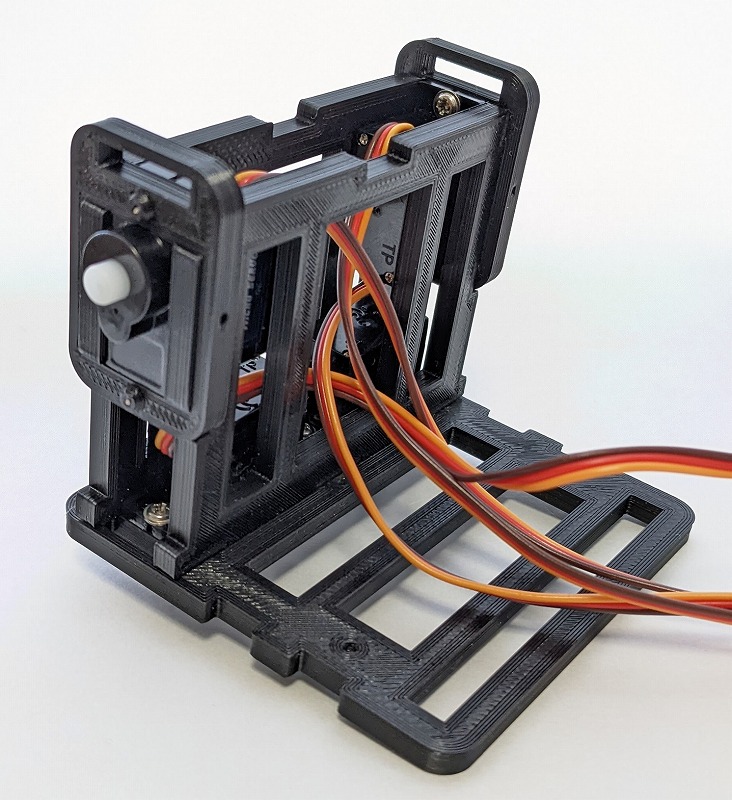
サーボの接続

サーボの位置と番号です。
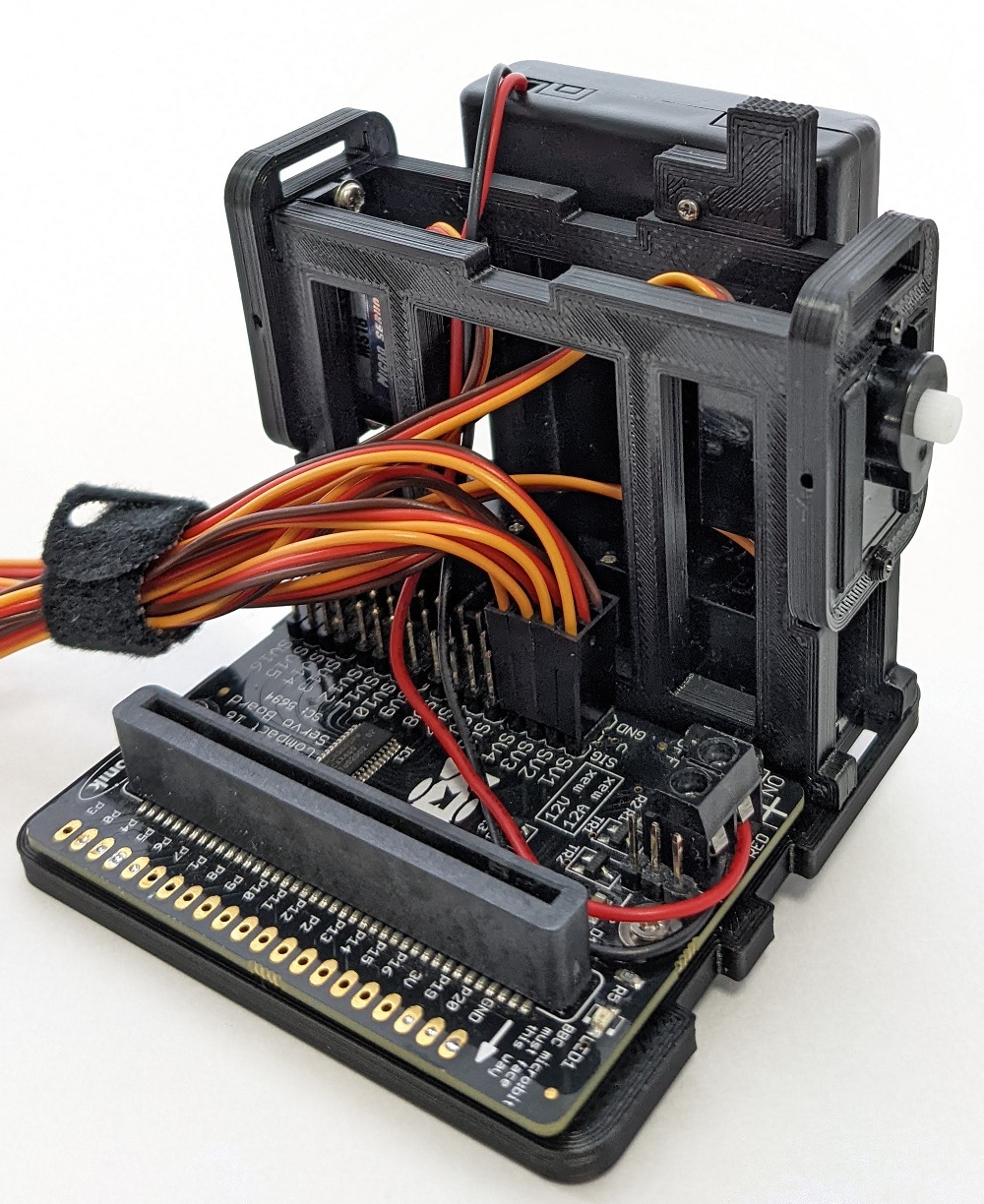
コントローラーに書いてあるSV1からSV4に、手前が黄色コード、奥が茶色のGNDになるように接続します。間違えるとサーボが壊れる場合があります。
これでボディの組み立てが完了です。