
初期調整した後、サンプルモーションを動かしてみます。
初期調整
組み立て時のサーボホーンのずれを調整します。
※ 10度程度を変更する必要がある場合は、サーボとサーボホーンの再組立ても検討されてください。
Micro:bit MakeCodeで、サーボの初期値を修正します。 
組み立て時に利用したセットアップ用コード「microbit-ForSetUp.hex」のS*の初期値を調整します。
変更値は、それぞれのロボットごとで異なると思います。
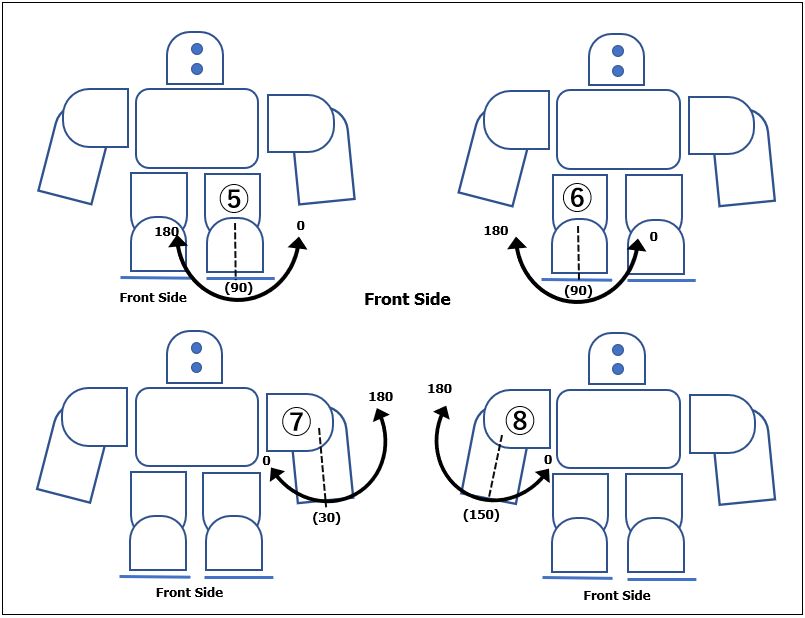
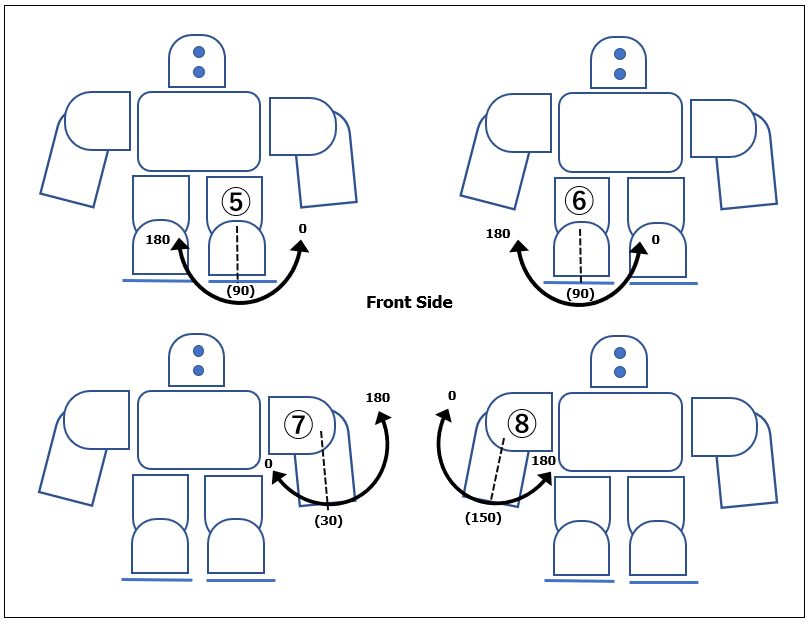
以下を参考にして、調整します。括弧内の数字がデフォルト値です。
例えば、サーボ番号1の場合、左腕が後ろに回っている場合は、前に回すために、120より少なく設定します。反対に、腕が前過ぎる場合は、120より多く設定します。 
サーボ番号

USBのオンオフスイッチケーブルがあると便利です。例えば、USB A オス メス 延長ケーブル 1m ON/OFF スイッチ付きは、データ転送もできます。
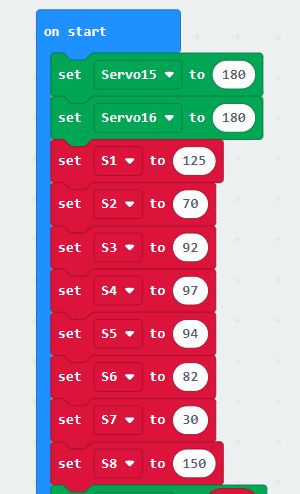
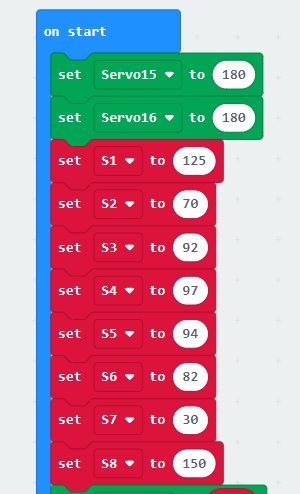 例えば、私の場合は、これを初期設定としました。
例えば、私の場合は、これを初期設定としました。
これで、初期調整は完了です。
サンプルモーション
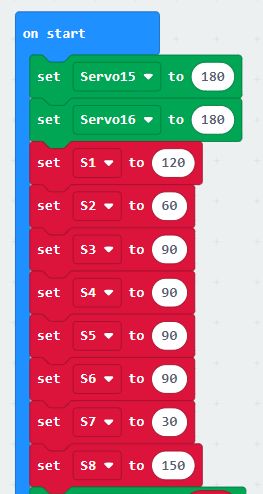
サンプルモーション「microbit-Sample.hex」をMicro:bitにインポートします。 上で確認した初期値をOn Start セクションに入力します。サンプルコードも thingiverseでダウンロードできます。
※ Micro:bitの拡張機能は”Kitronik I2C-16-servo”を利用しています。
例:
左の値を右のように確認した初期値に変更します。
再度、コードをインポートすれば準備完了です。
Micro:bitのAボタンを押すと、下のように動きます。(MS18を利用しています)
Micro:bitのBボタンを押すと、下のように動きます。(SG90を利用しています)
SG90とMS18を比較してみました。動きは同様に見えます。左がSG90, 右がMS18です。ただ、MS18は少しぐらぐらします。
どなたかモーションを共有頂けるとうれしいです。