
Initial adjustment
Adjust the displacement of the servo horn during assembly.
* If you need to change the temperature by about 10 degrees, consider reassembling the servo and servo horn.
 Adjust the initial value of the servo with Micro:bit MakeCode.
Adjust the initial value of the servo with Micro:bit MakeCode.
Adjust the initial value of S * of the setup code “microbit-ForSetUp.hex” used when assembling.
I think the change value will be different for each robot.
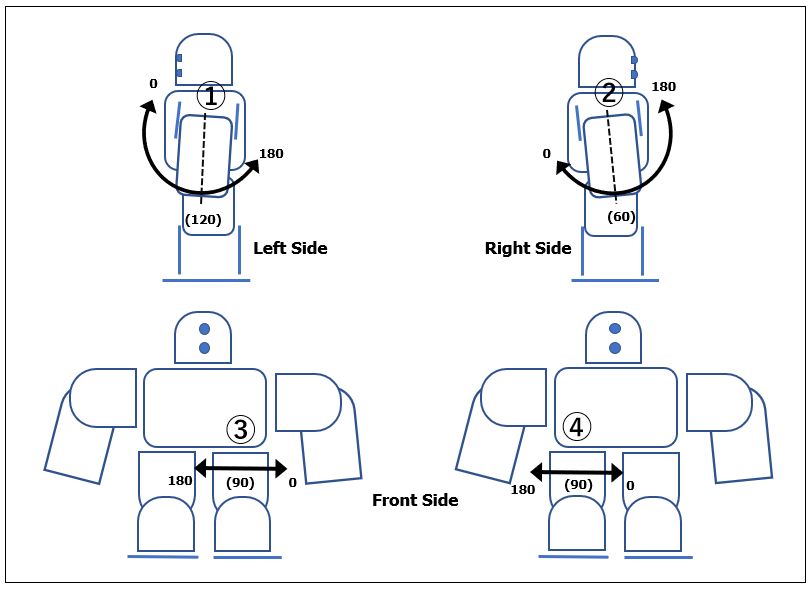
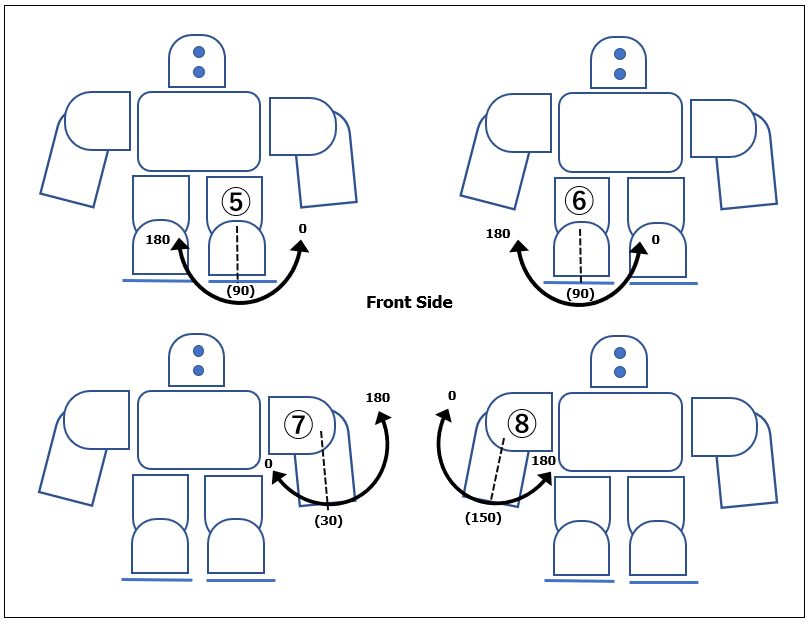
Refer to the following to make adjustments. The numbers in parentheses are the default values.
For example, for servo number 1, if the left arm is turning backwards, set it less than 120 to turn it forwards. On the other hand, if your arm is too forward, set it to more than 120.

Servo Number.
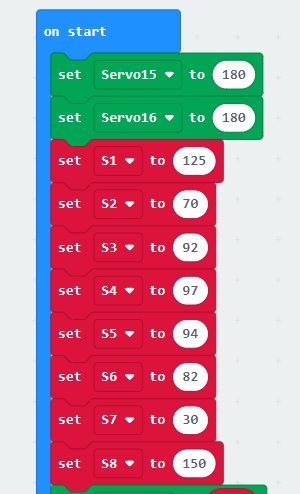
For example, in my case it looks like this.
This completes the initial adjustment.
Sample Motion
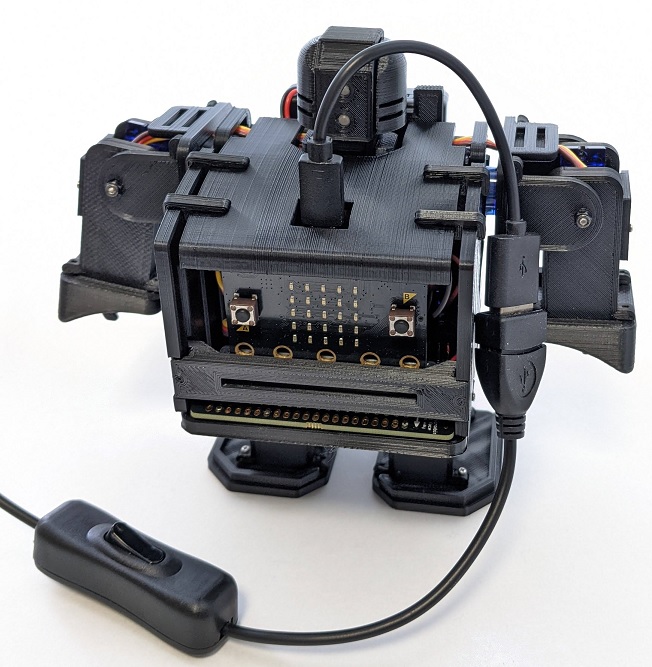
Import the sample motion “microbit-Sample.hex” into the Micro: bit. Enter the initial values found above in the On Start section. You can also download the sample code with thingiverse.
* The Micro: bit extension uses “Kitronik I2C-16-servo”.
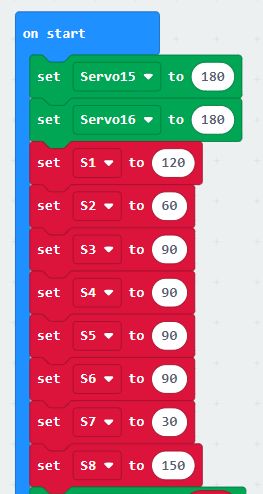
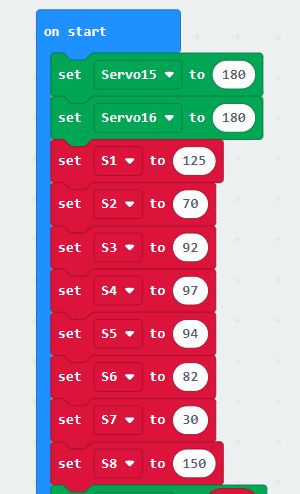
Example: Change the value on the left to the initial value confirmed as shown on the right.
Import the code again and you’re ready to go.
If you press the A button on the Micro:bit, it will move as shown below. (using MS18)
If you press the B button on the Micro:bit, it will move as shown below. (using SG90)
I compared SG90 and MS18. Looks the same. The left is SG90 and the right is MS18. However, MS18 is a little loose.
I would be happy if anyone could share the motion.